SVPWM
简介
SVPWM(Space Vector Pulse Width Modulation),即电压空间矢量调制,是一种PWM生成方法,其作用是在主电路中生成给定的电压信号,而不是电机控制方法,这里需要与电机矢量控制做一个区分。
SVPWM给定的是目标电压矢量,输出的是六个PWM波,这六个PWM波控制IGBT的通断,在主电路中生成三相PWM,三相PWM的基波合成起来就是目标电压矢量。
基本原理
假设电机内部绕组接法为星形接法,以如下图所示的IGBT逆变器为例来进行说明
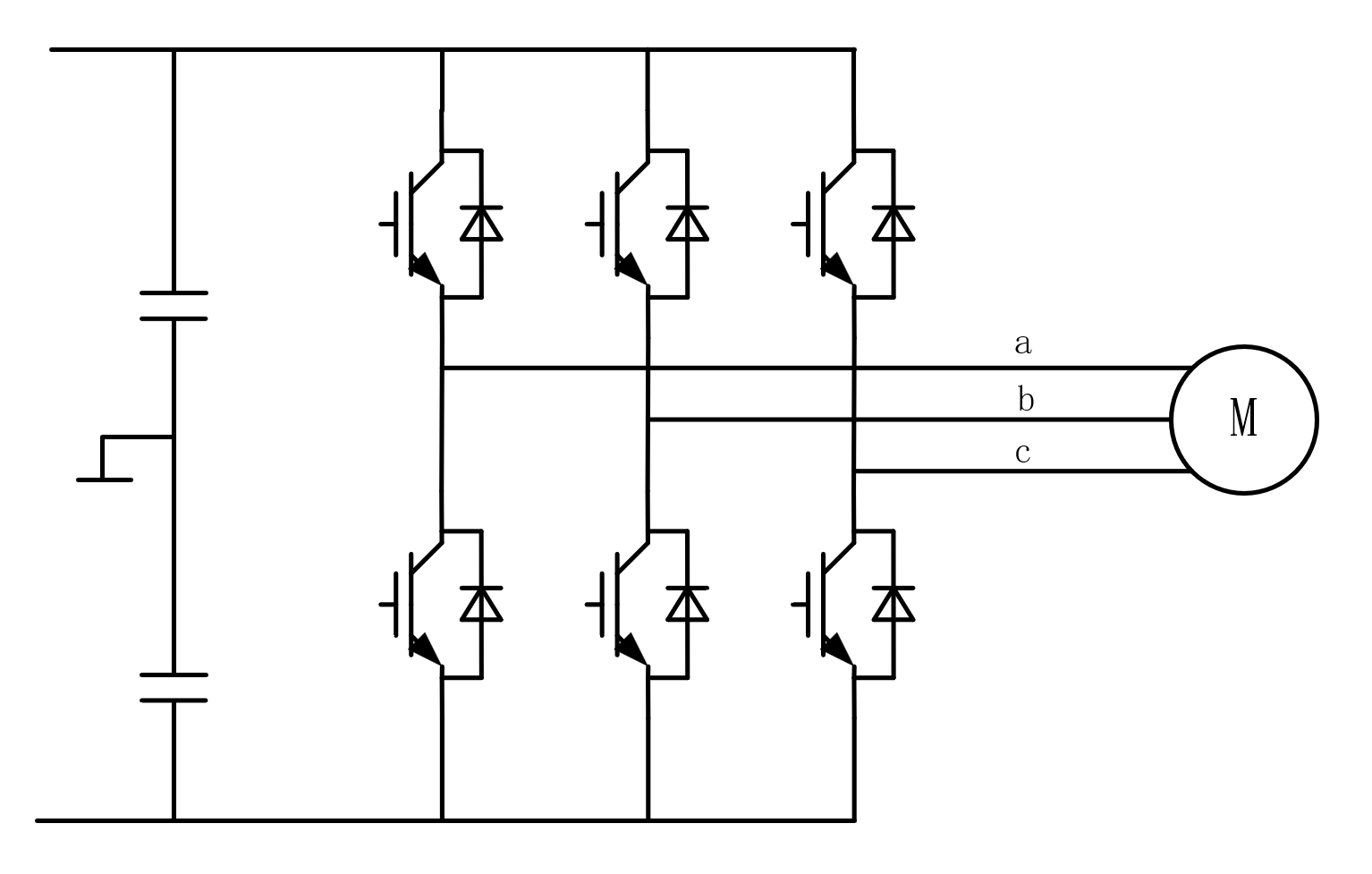
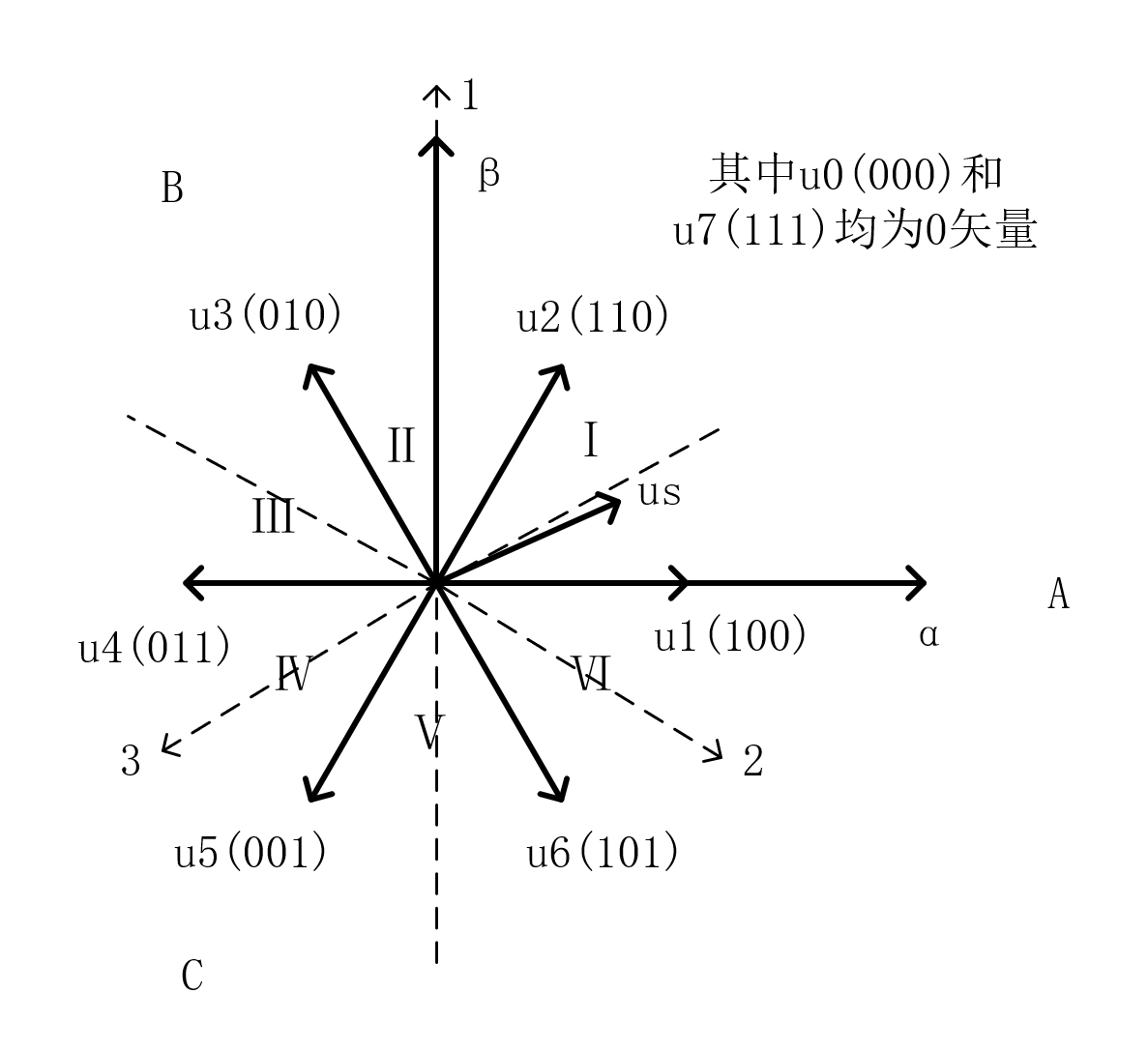
设$S_A=1$代表A相上管通,$S_A=0$代表A相下管通,$S_B,S_C$类似设定,则可以得到SVPWM的基本电压矢量为下图$u_0 ~ u_7$所示
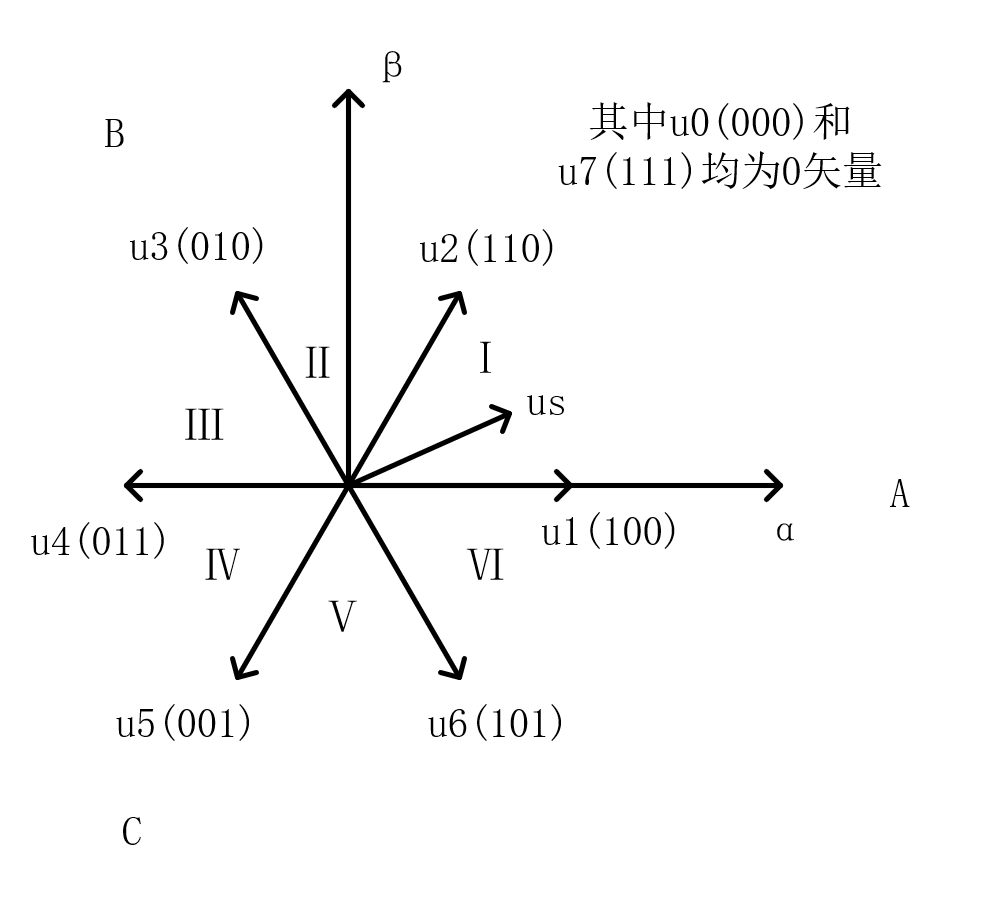
矢量的合成应该遵循相邻原则和平均值等效原则。设这六个区分别为$Ⅰ ~ Ⅵ$,假设现在目标电压矢量处在$Ⅰ$区,那么应该由基本电压矢量$u_1和u_2$合成。如果设开关周期时间为$T_0$,$u_1$作用时间为$t_1$,$u_2$作用时间为$t_2$,那么应该有
$$
T_0u_s=t_1u_1+t_2u_2
$$
根据三角形的正弦定理和余弦定理,就可以算出$t_1,t_2$的大小
如果$t_1+t_2<T_0$,多出来的时间就是零矢量的作用时间,$t_0=T_0-t_1-t_2$
如果$t_1+t_2>T_0$,则令$t_1’=\frac{t_1}{t_1+t_2}T_0,t_2’=\frac{t_2}{t_1+t_2}T_0$
用上述$t_1’,t_2’$代替原有的导通时间
但是$t_1,t_2,t_0$在$T_0$中的时间分配是自由的,一般来说,一方面希望尽量减少开关次数减少开关损耗,另一方面希望减少谐波成分
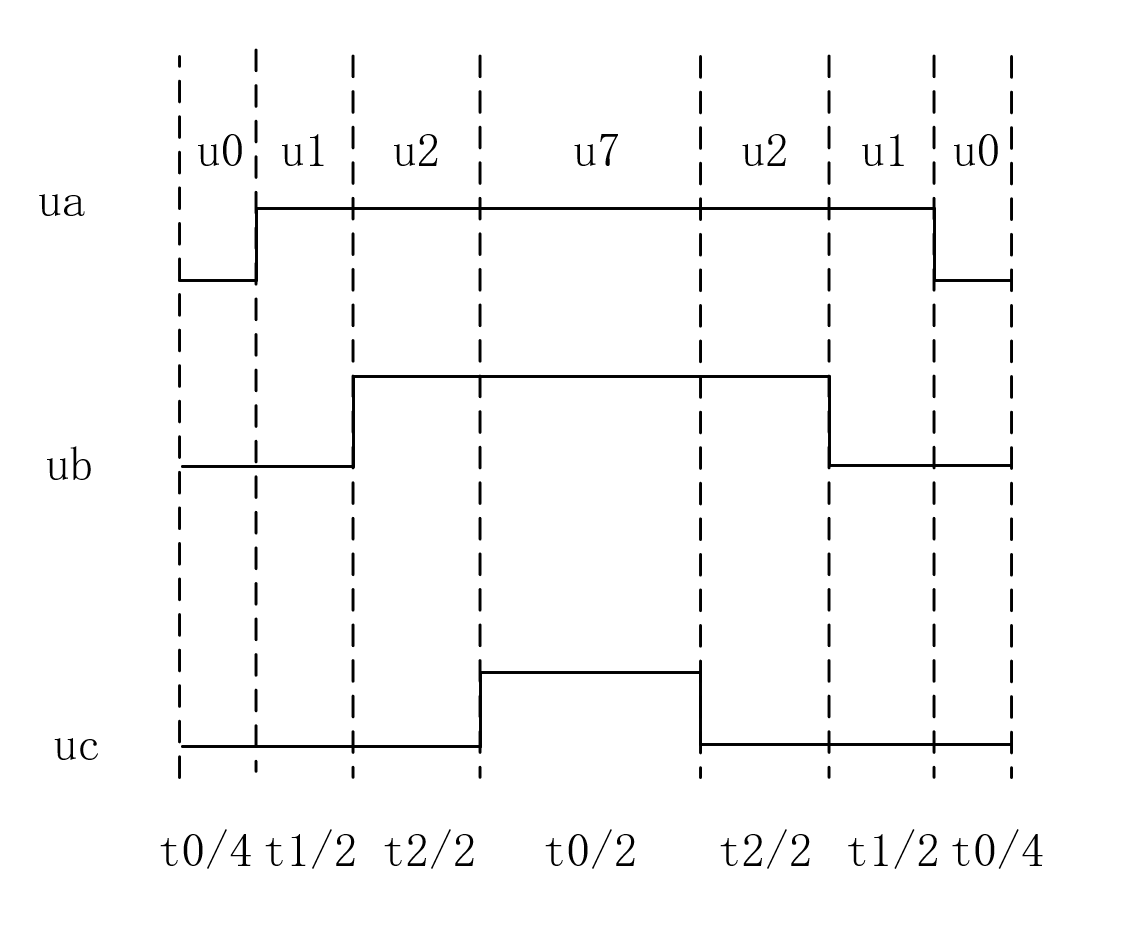
一般而言有两种实现方式,分别是零矢量集中和零矢量分散方式
以上图img2为例,集中和分散分别对应于img3和img4
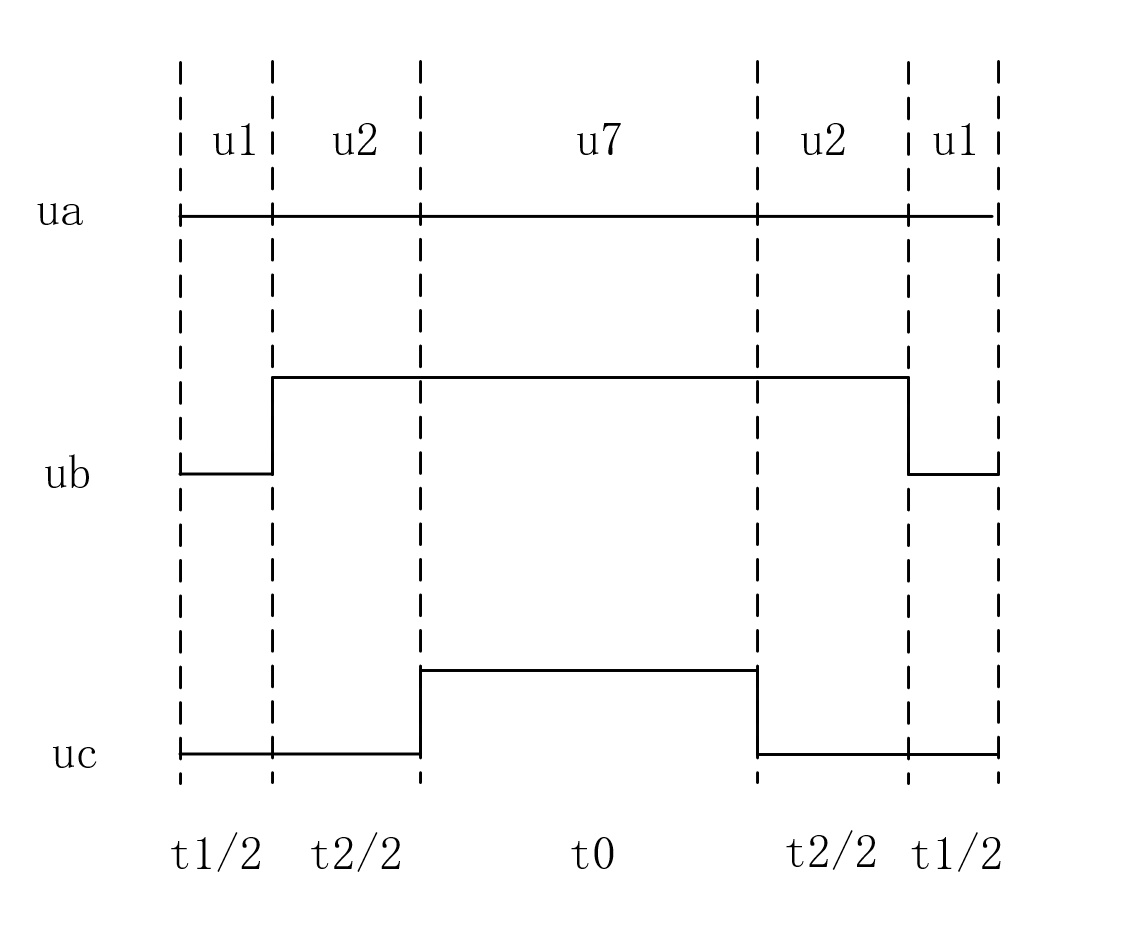
集中的优势在于开关损耗较小,但是由于零矢量单次停留时间过长,会导致谐波成分增加
而分散的优劣势则恰恰与集中相反
Simulink实现
总体的形状应该如img5所示,其中$u_\alpha,u_\beta$给定,也就是说,$u_s$给定,直流电压$U_d$和开关周期时间$T_0$已知
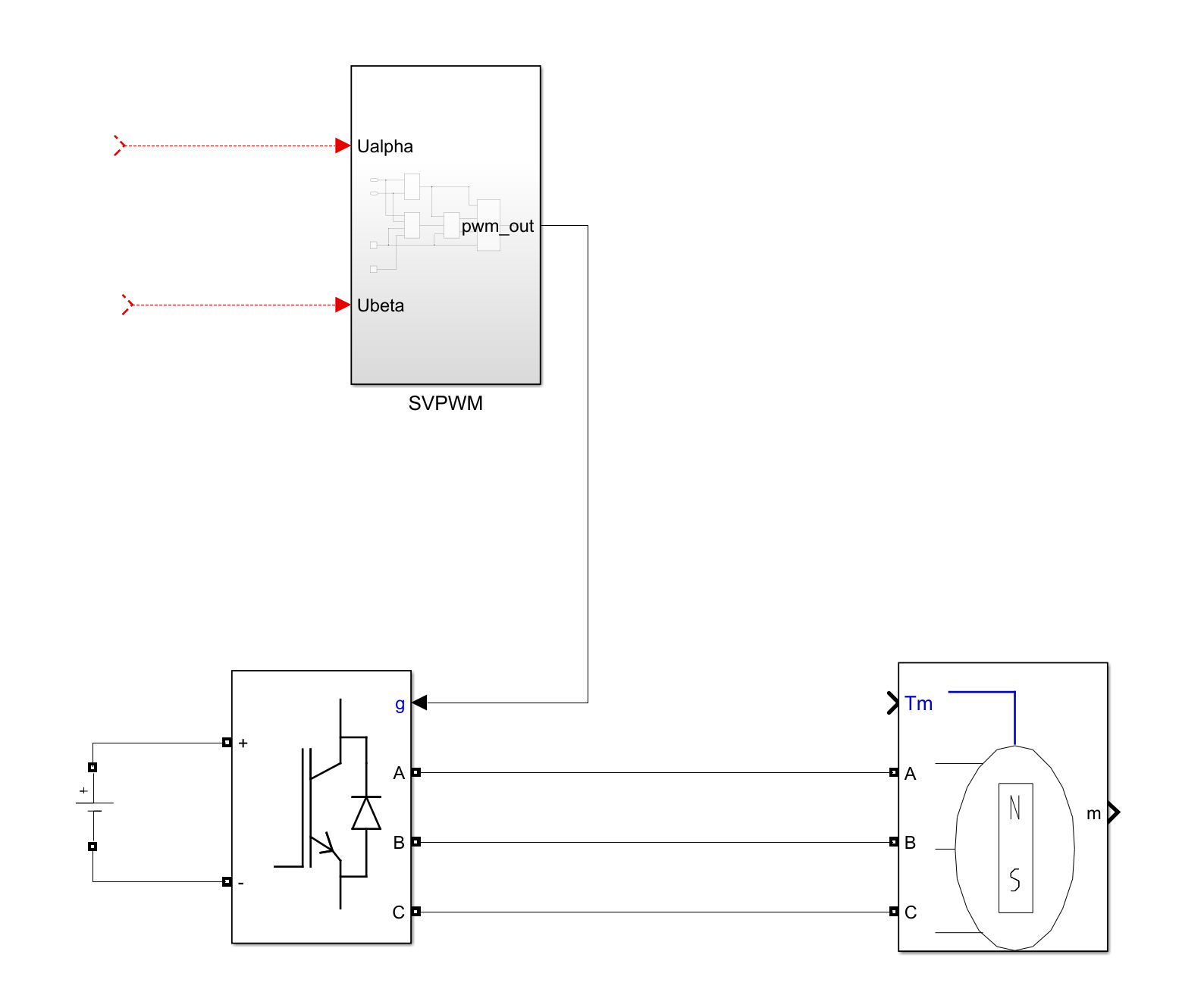
为了实现功能,可以粗略的将整个模块分为三部分:电压矢量区块检测模块、$T_1,T_2$计算模块和PWM波生成模块
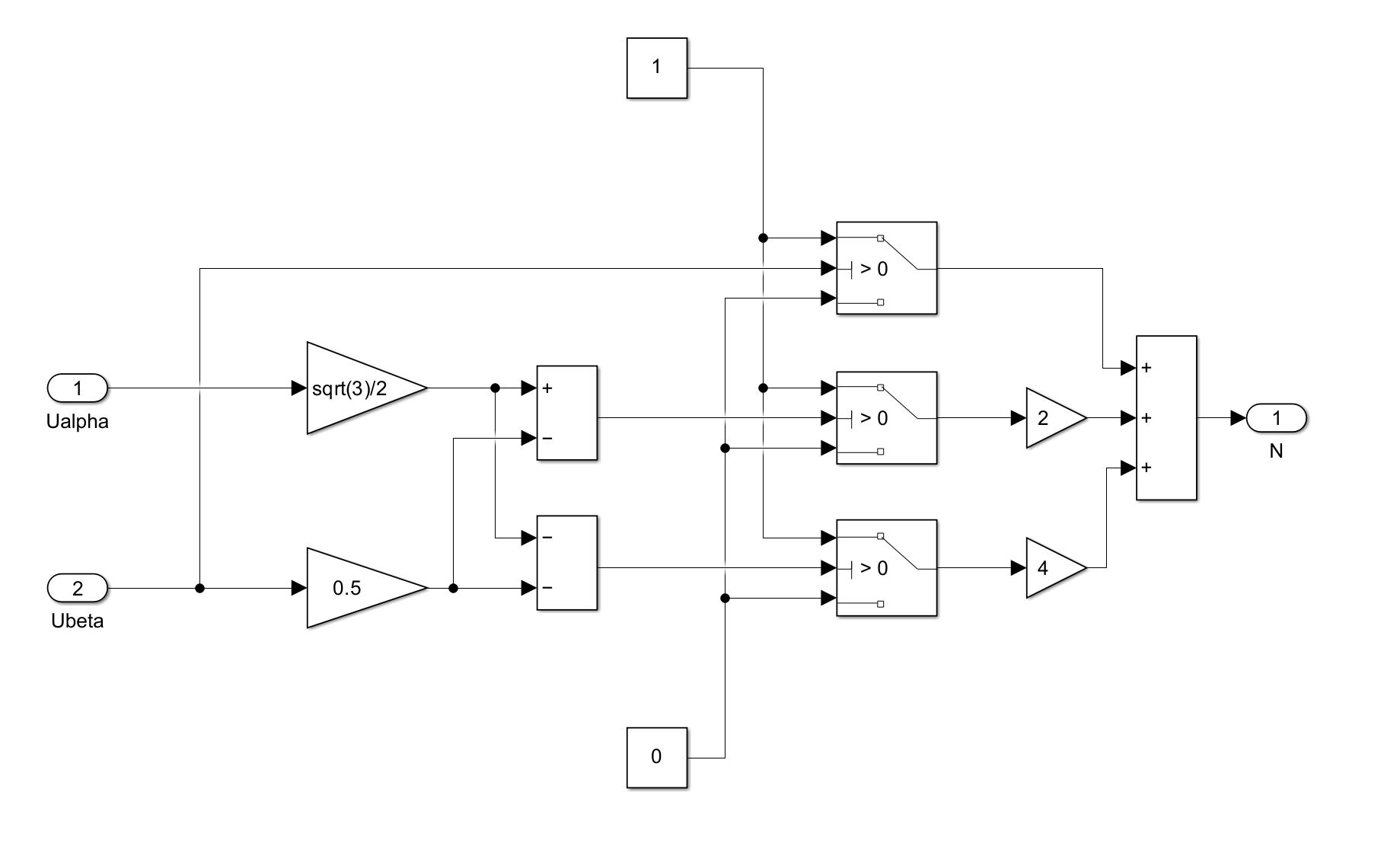
电压矢量区块检测模块
可以用投影的方式确定电压矢量所在区块,如图img6所示,将电压矢量往$1~3$三个方向投影,则可以得到投影大小为
$$
\begin{cases}
u_{ref1}=u_\beta \\
u_{ref2}=\frac{\sqrt{3}}{2}u_\alpha-\frac{1}{2}u_\beta \\
u_{ref3}=-\frac{\sqrt{3}}{2}u_\alpha-\frac{1}{2}u_\beta
\end{cases}
$$
定义一个二进制数$N=CBA_2$,如果$u_{ref1}>0$,则$A=1$,否则$A=0$。其余C对应$u_{ref3}$,B对应$u_{ref2}$,类似定义
那么可以得出
| N | 3 | 1 | 5 | 4 | 6 | 2 |
|---|---|---|---|---|---|---|
| 扇区 | Ⅰ | Ⅱ | Ⅲ | Ⅳ | Ⅴ | Ⅵ |
在Simulink当中的实现如img7所示
$T_1,T_2$计算模块
以第Ⅰ扇区为例,设$U_{dc}$为直流电压大小,则$|u_1|=|u_2|=…=|u_6|=\frac{2}{3}U_{dc}$
$$
\begin{cases}
u_\beta=\frac{t_2}{T_0}u_2sin\frac{\pi}{3} \\
u_\alpha=\frac{t_2}{T_0}u_2cos\frac{\pi}{3}+\frac{t_1}{T_0}u_1
\end{cases}
$$
于是可得
$$
\begin{cases}
t_1=\frac{\sqrt{3}T_0}{U_{dc}}(\frac{\sqrt{3}}{2}u_\alpha-\frac{1}{2}u_\beta) \\
t_2=\frac{\sqrt{3}T_0}{U_{dc}}u_\beta
\end{cases}
$$
在其他区同理可以计算作用时间
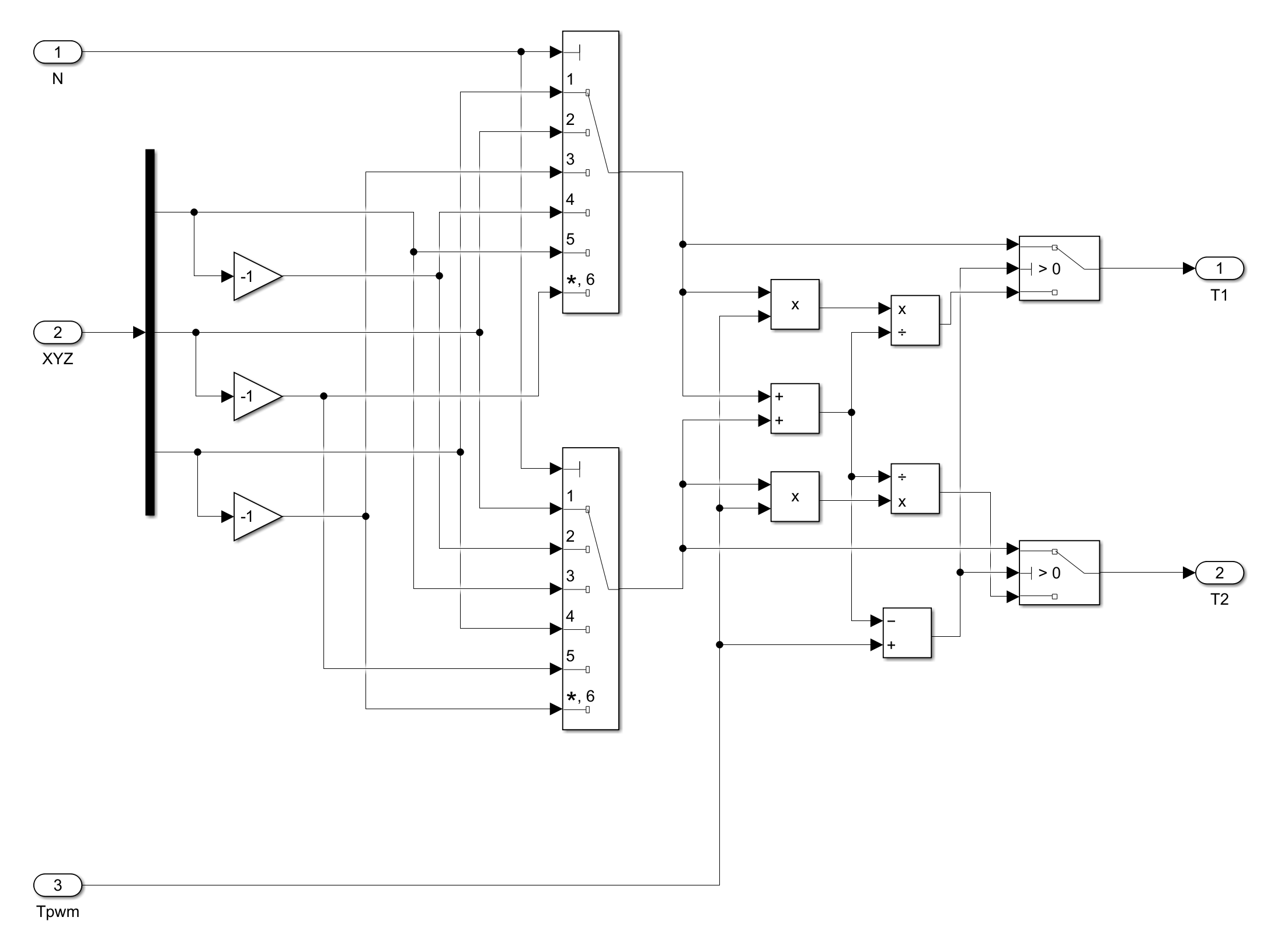
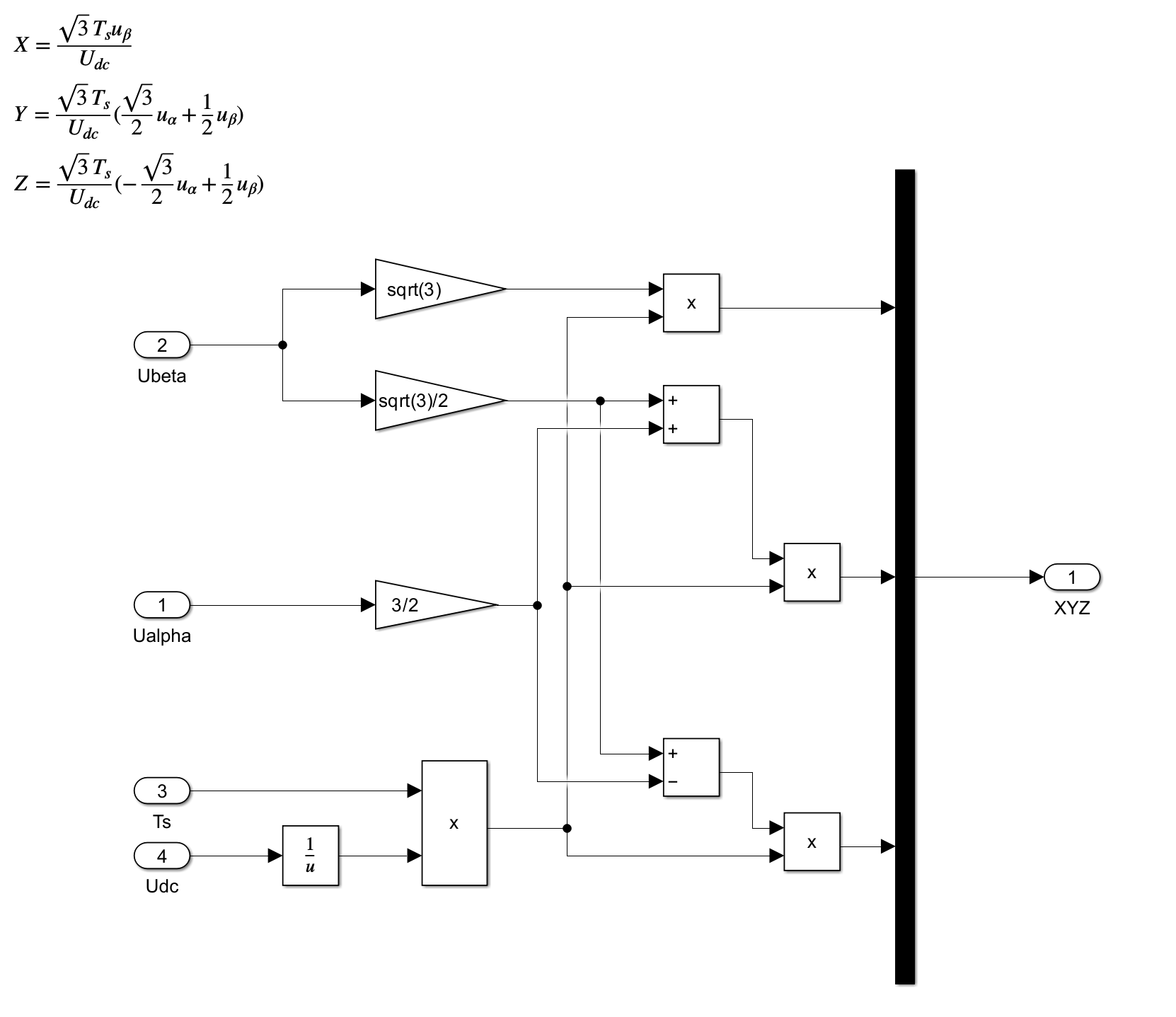
在这里可以对所有情况做一个归纳
定义:
$$
\begin{cases}
X=\frac{\sqrt{3}T_0}{U_{dc}}u_\beta \\
Y=\frac{\sqrt{3}T_0}{U_{dc}}(\frac{\sqrt{3}}{2}u_\alpha+\frac{1}{2}u_\beta) \\
Z=\frac{\sqrt{3}T_0}{U_{dc}}(-\frac{\sqrt{3}}{2}u_\alpha+\frac{1}{2}u_\beta)
\end{cases}
$$
这样不同N值对应的时间可以总结为下表
| N | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| $T_1$ | Z | Y | -Z | -X | X | -Y |
| $T_2$ | Y | -X | X | Z | -Y | -Z |
在Simulink当中的实现如img8和img9所示
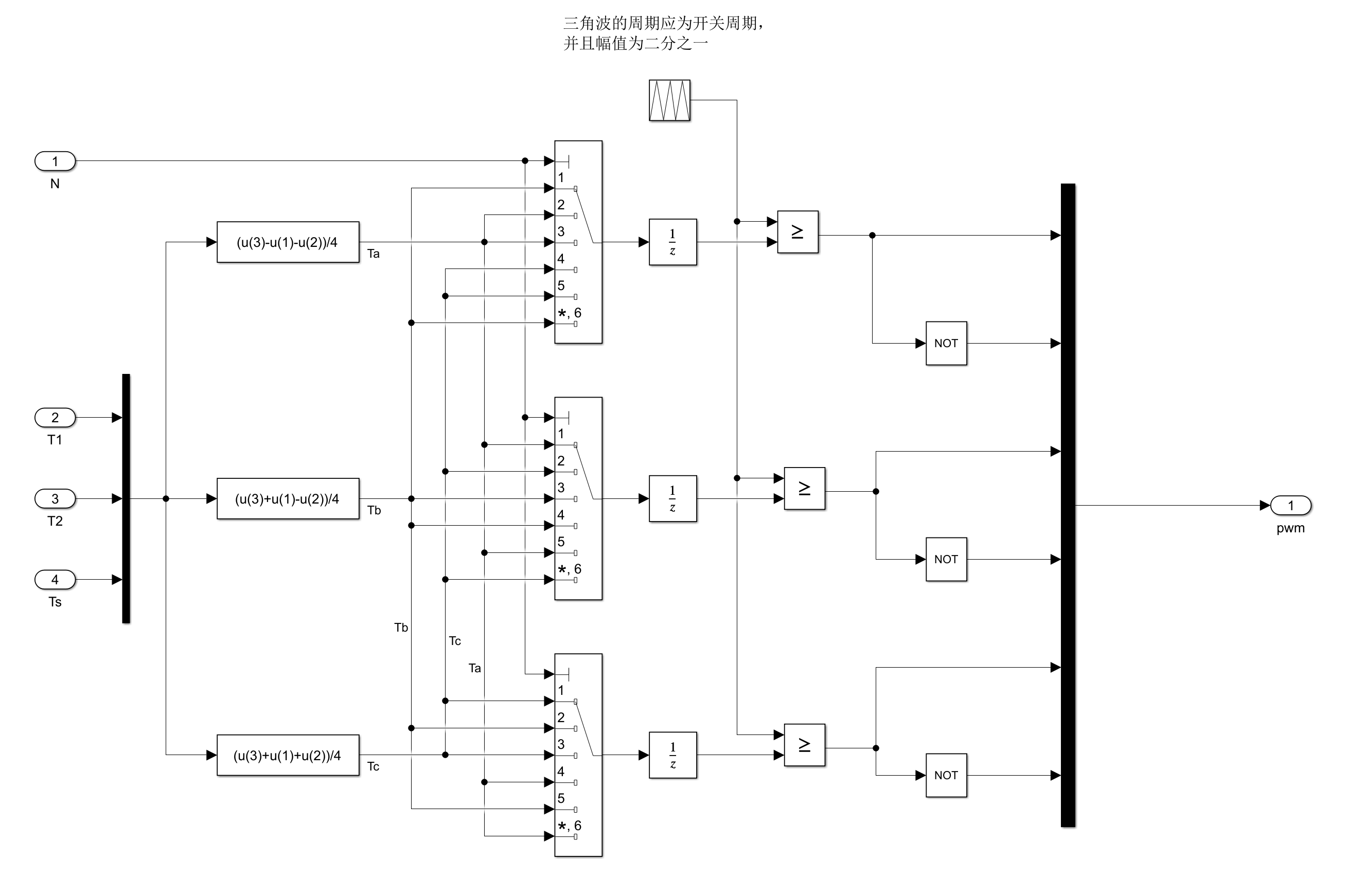
PWM波生成模块
要生成PWM波需要确定$a,b,c$三管的开关时间,下面以第Ⅰ扇区,采用零矢量分散式为例
这里可以参考前面的img4,可以看到三个管的开启时间分别为
$$
\begin{cases}
T_{a1}=\frac{T_0-t_1-t_2}{4} \\
T_{b1}=T_{a1}+\frac{1}{2}t_1 \\
T_{c1}=T_{b1}+\frac{1}{2}t_2
\end{cases}
$$
注:零矢量集中式则可以参考img3推得
对于所有扇区的情况,如果定义$T_a,T_b,T_c$分别为三个管开启的时间,可以将开启时间总结为下表
| N | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| $T_A$ | $T_{b1}$ | $T_{a1}$ | $T_{a1}$ | $T_{c1}$ | $T_{c1}$ | $T_{b1}$ |
| $T_B$ | $T_{a1}$ | $T_{c1}$ | $T_{b1}$ | $T_{b1}$ | $T_{a1}$ | $T_{c1}$ |
| $T_C$ | $T_{c1}$ | $T_{b1}$ | $T_{c1}$ | $T_{a1}$ | $T_{b1}$ | $T_{a1}$ |
在Simulink当中的实现如img10所示
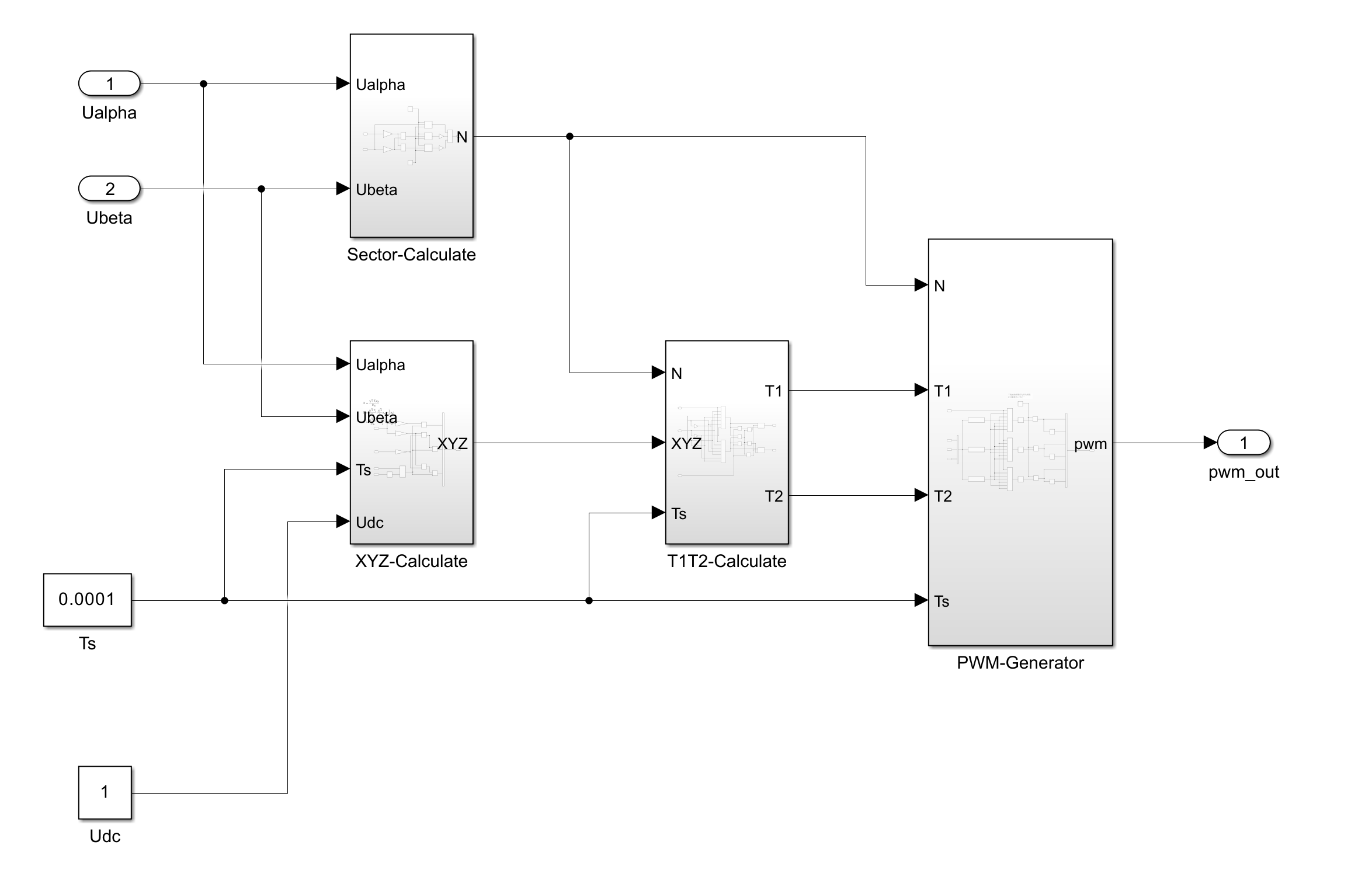
总结
将所有模块联合起来,SVPWM的内部结构就如img11所示
三角接情况
以上论述了电机绕组为星形接法时的情况,那么当绕组为三角形接法时情况会发生什么变化呢?
事实上,基本原理并没有发生变化,只不过基本电压矢量旋转了30°,开关与电压矢量的对应关系发生了改变
后续的电压矢量作用时间计算模块和PWM生成模块按照改变后的关系分别计算即可。